2019.09.15(日) ETロボコン中四国大会
ETロボコン中四国地区大会
2019年9月15日(日)、私たちは、本番の日を迎えました。 今年のETロボコンの中四国地区大会には、SLPから4名が出場しました。 大会は、広島県福山市の福山大学宮地茂記念館で行われました。
ETロボコンは、組込みシステム分野における技術教育・人材育成を テーマとしたETソフトウェアデザインロボットコンテストです。 日本の産業競争力に欠くことのできない重要な「組込みシステム」分野における 技術教育をテーマに、決められた走行体で指定コースを自律走行する競技です。 同一のハードウェア (LEGO Mindstorms™) に、UML等で分析・設計した ソフトウェアを搭載し競うコンテストです。
オープン参加型で産学官連携協力により開催され、 今年 (2019年) で通算18回目の開催です。
試走
最終試走は、走行体を本番のコースで走らせ、チェックを行う最後の機会です。 ゴールラインの通過を見届ける予定でしたが、安定したスタートができないというトラブルが発生しました。 具体的には、スタート後にバランスを崩してしまうというものです。 スタートのトラブルは、想定していなかったため、かなり焦りました。 走行体の様子を動画で撮影し、原因究明を急ぎました。 残念なことに、試走中に解決策を見つけ出すことはできず、 その後の控室で、規約とプログラムを何度も確認しました。
本番
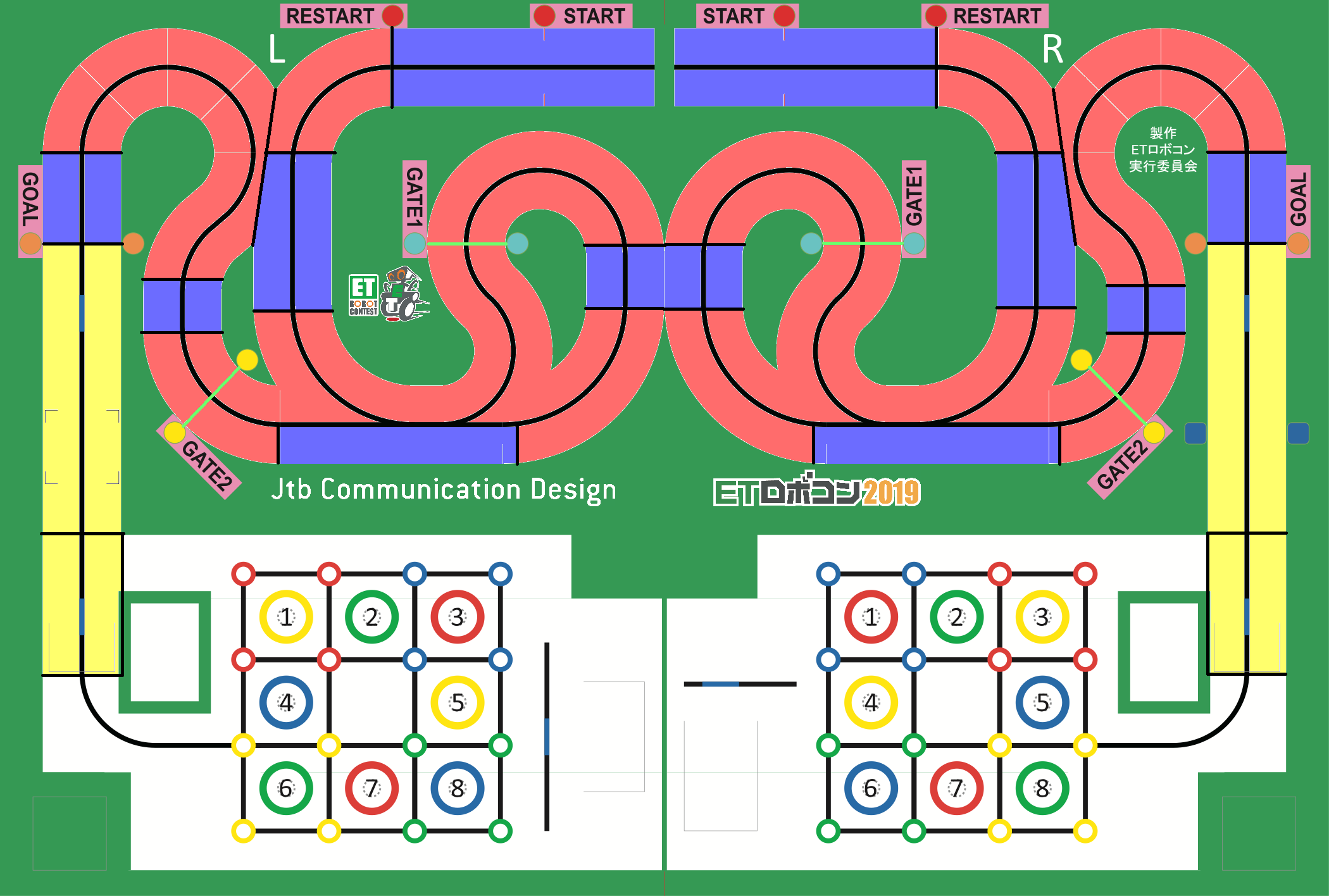
コースは、L・Rコースの二つに分かれており、2チームずつ順に出場します。 LコースとRコースは、左右対称のコースとなっています。 今年度は、L・Rコースのうち、タイムの早い方が記録として採用されます。
ゴールライン通過後、各コースでは難所が用意されています。 Lコースでは、完走後に、シーソーとガレージインを行います。 Rコースでは、完走後に、ルックアップゲートとガレージインを行います。 私たちは、コースを直線・曲線・難所の三つの区間に分け、対策を行ってきました。
本番は、ゼッケンをつけたメンバーのみが、ピットへ立ち入ることができます。 そのうち襷を持った2名が競技フィールド内へ立ち入ることが可能です。 1名が走行体をスタート位置に設置、1名が競技フィールド内の操作台から、 リモートスタートの信号を送信します。
1走目、私たちは、Lコースからのスタートでした。 当初の予定では、1走目で確実なゴールを狙い、2走目でより速いタイムを目指す予定でした。 しかし、シーソーへの対策が不十分であったことに加え、試走で安定した走りができなかったことから、 上手くいかなかった場合を想定し、走行体の様子を見て、2走目に繋げることを考えました。
1走目のカウントダウンに合わせ、リモートスタートに成功しました。 スタートの直後は安定したように見えました。 しかし、すぐにバランスを崩してコースアウトしてしまい、 結果は、リタイアとなってしまいました。
2走目までの間に、控室で話し合いと改良を行いました。 結果、2走目では、安定させるため、速度を落とすことにしました。 2走目のカウントダウンの合図に合わせ、リモートスタートの合図を送ります。 残念ながら、1走目と同様に、スタート時にバランスを崩し転倒してしまいました。 しかし、幸運にも、今回の転倒は、リスタートラインの手前で発生しました。 そのため、タイムの計測は続いているものの、再スタートを行うことができました。
再スタートの後、第一ゲート、第二ゲートを通過し、 最終的に、ゴールラインを通過することができました。 その後のルックアップゲートでは、ダブルまではクリアすることができたものの、 距離が足らず、トリプルのクリア判定は得られませんでした。 それから、車体がコースから逸れてしまい、ガレージインのクリアはできませんでした。 難所の攻略は不完全だったものの、ゴールラインは通過したため、完走賞を貰うことができました。
大会を終えて
走行成績は良いとは言えないものでしたが、大会への参加は、良い経験になりました。 2走目で、はじめに転倒せず順調にゴールが出来ていれば、 さらに良い成績が出せていたので、その点に関して、若干の悔いはあります。 しかし、完走できたので良かったと思います。
また、ETロボコンというイベントを通じて、学外の人と交流したことは、 視野を広げる良い機会となりました。
来年は今年学んだことを生かして、スタートをバッチリ決めていきたいです。